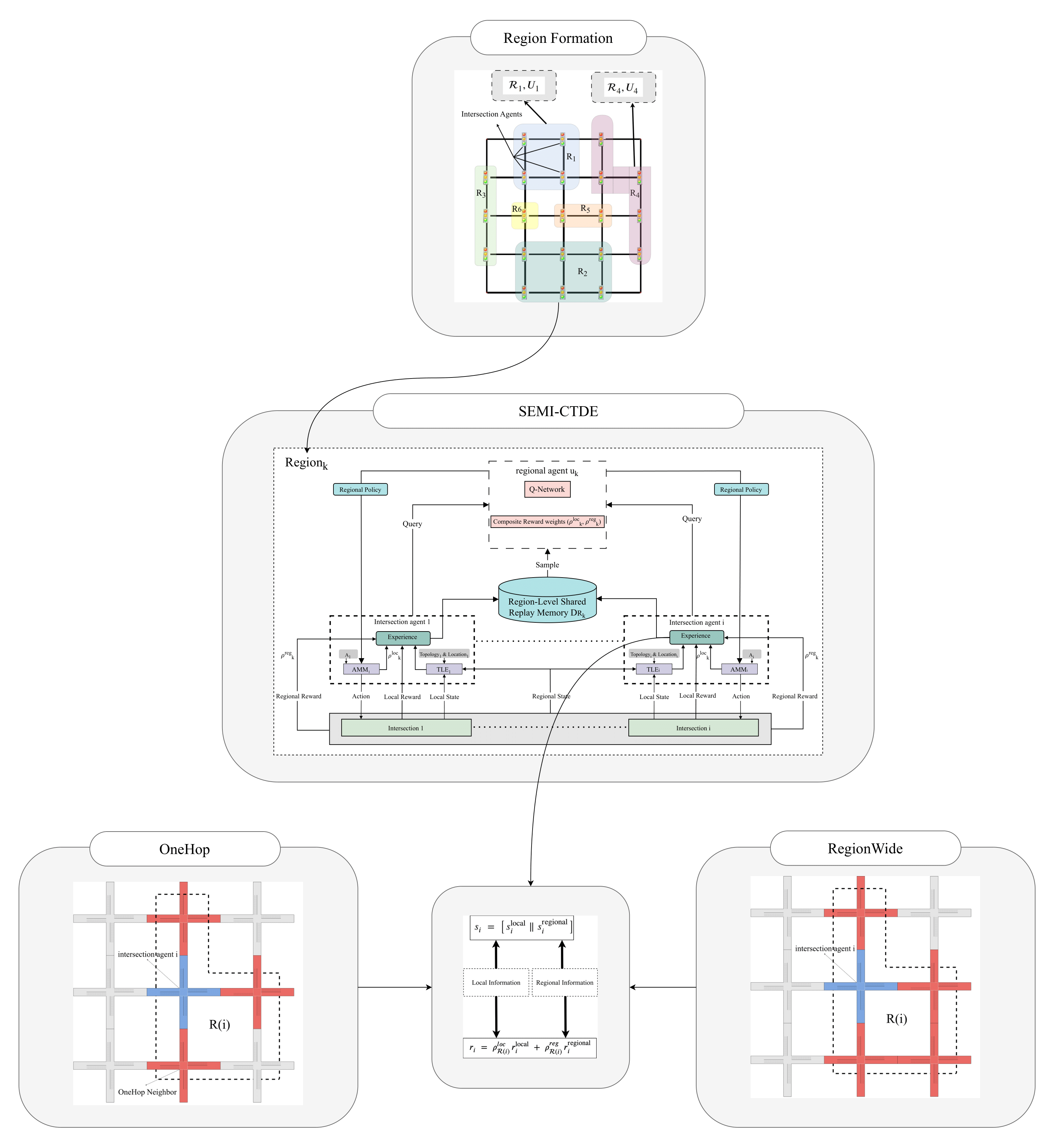
Semi-Centralized Training, Decentralized Execution Architecture for
Multi-Agent Deep RL in Traffic Signal Control
A. Rezaali, P. Yazdani, M. Abdoos · Under review at
Transportation Research Part C
Proposes a transferable SEMI-CTDE region-based multi-agent RL architecture for adaptive traffic signal control with two complementary model variants and extensive ablations.
View preprint on arXiv View code on GitHub